




手 機:15112316407
Q Q:272794434
網 址:www.meiligongfang.com
地 址:廣東省東莞市大嶺山鎮農村工業路22號101室
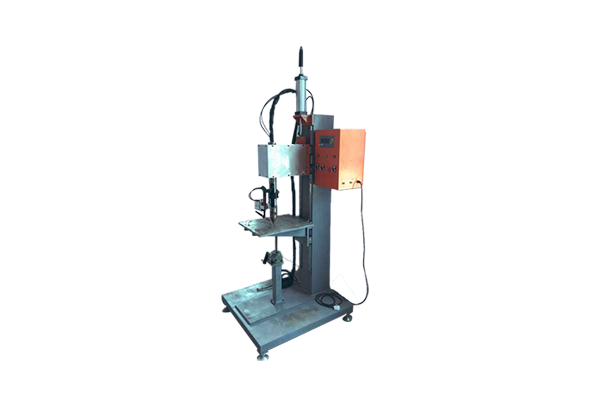
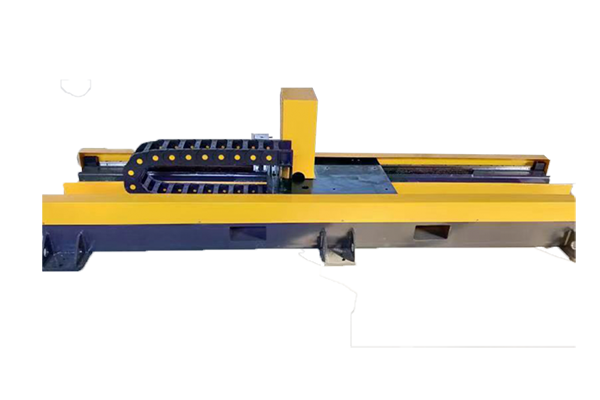
焊接機器人廠家選用的主動行走機構,焊槍氣動定位,各種動作敏捷準確,作業功用穩定牢靠。體系操控器,首要用于各組成部分的聯動操控,焊接程序的操控,首要焊接參數的設定,調整和顯示。必要時可擴展故障診斷和人機對話等操控功用。采購焊接機器人焊接機架選用移動機構,其由焊接機頭,焊接機頭支承架,懸掛式拖板等組成,關于精細型焊頭機構,其驅動體系應選用裝有編碼器的伺服電動機。熔化極氣體維護焊、電阻焊、電子束焊,激光焊、高頻焊、氣焊、爆破焊等都是設備常用的焊接工藝辦法。

采購焊接機器人焊接時應先調理電極桿的位置,使電極剛好壓到焊件時,電極臂堅持相互平行。電流調理開關級數的挑選可按焊件厚度與材質而選定。通電后電源指示燈應亮,電極壓力大小可調整繃簧壓力螺母,改動其緊縮程度而獲得。焊接機器人廠家焊件準備及裝配:鋼焊件焊前須清除一切臟物,對熱軋鋼,最好把焊接處先經過酸洗、噴砂或用砂輪清除氧化皮。未經整理的焊件雖能進行點焊,但是嚴重地下降電極的使用壽命,同時下降點焊的出產效率和質量。關于有薄鍍層的中低碳鋼能夠直接施焊。

采購焊接機器人要求金屬要有較好的塑性。焊接時,先把焊件外表清理干凈,再把被焊的板料搭接安裝好,壓在兩柱狀銅電極之間,施加力壓緊。當經過足夠大的電流時,在板的接觸處產生很多的電阻熱,將中心最熱區域的金屬很快加熱至高塑性或熔化狀態,構成一個透鏡形的液態熔池。繼續保持壓力,斷開電流,金屬冷卻后,構成了一個焊點。焊接機器人廠家點焊由于焊點間有一定的間距,所以只用于沒有密封性要求的薄板搭接結構和金屬網、交叉鋼筋結構件等的焊接。

焊接機器人廠家焊接時應先調度電極桿的方位,使電極剛好壓到焊件時,電極臂堅持相互平行。電流調度開關級數的選擇可按焊件厚度與材質而選定。通電后電源指示燈應亮,電極壓力巨細可調整彈簧壓力螺母,改變其緊縮程度而取得。在完畢上述調整后,可先接通冷卻水后再接通電源預備焊接采購焊接機器人。焊接進程的程序:焊件置于兩電極之間,踩下腳踏板,并使上電極與焊件觸摸并加壓,在持續壓下腳踏板時,電源觸頭開關接通,所以變壓器開端作業次級回路通電使焊件加熱。
采購焊接機器人接通電源后,先使焊件兩端面在夾具移動下,輕微觸摸構成許多具有很大電阻和高電流密度的觸點,所承受的壓力簡直為零,發生很大的熱量,瞬間燒化而構成銜接焊件兩端面的液態金屬過梁。金屬液體過梁上效果著電磁力,徑向緊縮效應力及外表分子張力,過梁內部同它的外表之間構成巨大的壓力差和溫度差,在電流加熱效果下,過梁液體迅速脹大爆破構成亮光。焊接機器人廠家亮光進程便是液體過梁不斷構成和爆破進程。亮光效果:加熱了焊件。燒掉了焊件端面臟物和不平物質。
手機:15112316407(蔣生)
電話:13923782005(何生)
郵箱:272794434@qq.com
地址:廣東省東莞市大嶺山鎮農場工業路22號101室

微信號
